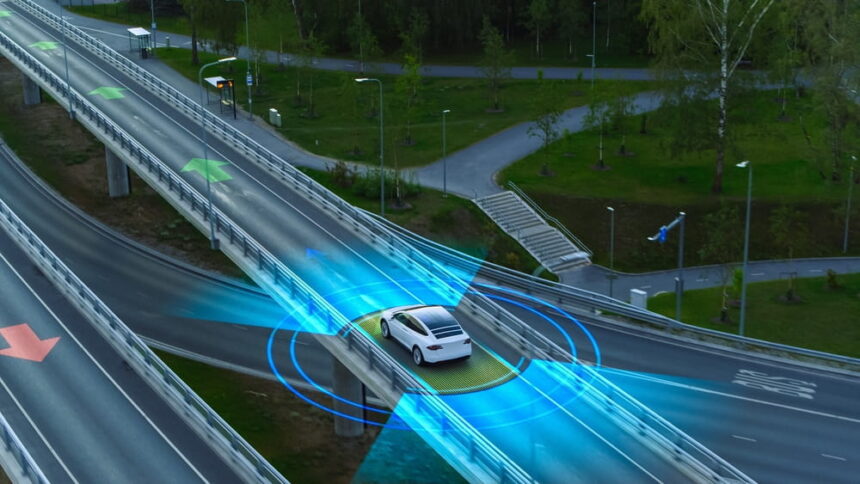
Why Data Annotation Matters for Autonomous Vehicles
Perception models are only as good as the data they learn from. A robotics stack trained on noisy or inconsistent labels will hesitate when it should act and act when it should hesitate. For autonomous vehicles, where decisions happen in milliseconds and consequences can be irreversible, the quality of every bounding box and segmentation mask shows up in how the model behaves on the road.
The Role of Annotation in AV Safety and Performance
Safety cases for autonomous driving rest on perception models that detect and classify road users across a wide range of conditions. Rain, glare, nighttime driving, occluded pedestrians, and construction zones all stress perception in different ways. High-quality annotation gives models the reference points they need to generalize across these conditions rather than overfitting to clean highway footage. When annotators correctly distinguish between a cyclist and a pedestrian walking a bike, models learn the subtle cues that drive better predictions.
Where Annotation Fits in the AV Stack (Perception, Prediction, Planning)
Annotation touches every layer of the autonomous stack. In perception, labels train object detectors and segmentation networks. In prediction, annotated trajectories teach models how cyclists, drivers, and pedestrians tend to move over time. In planning, labeled scenarios inform policies that govern lane changes, yields, and merges. Because these layers feed into each other, weak annotation at one stage propagates through the whole pipeline.
What Makes AV Data Annotation Different?
Annotation for autonomous vehicles is harder than most other computer vision work. Data arrives in massive volumes from multiple synchronized sensors, scenes include dozens of moving actors per frame, and the cost of a labeling error can be severe. Annotators need domain fluency in traffic rules, vehicle behavior, and regional driving conventions that differ from city to city, which is why human-in-the-loop workflows backed by trained domain experts have become standard practice rather than a nice-to-have. Pure automation cannot reliably resolve the ambiguous cases that define real driving, and pure manual labeling cannot scale to the volumes modern AV programs need.
Temporal consistency adds another layer of difficulty. An object tracked across a hundred frames needs a stable identity, accurate position, and consistent class label throughout. Teams also have to reconcile labels across modalities so that a car in the camera frame matches the same car in the LiDAR point cloud, with agreement on size, heading, and velocity. Innovative annotation platforms address some of this through model-assisted labeling, where a pre-trained model produces draft annotations that human reviewers correct and refine. Done well, this combination raises throughput without giving up quality.
Key Autonomous Vehicle Use Cases
Autonomous mobility covers a wide spectrum of applications, each with its own annotation priorities and edge cases. Perception teams working in any of these areas face the same core challenge of teaching models to read the world accurately, even though the sensors, environments, and failure modes look very different from one domain to the next.
On-Road Driving and Robotaxis
Robotaxi fleets and autonomous passenger vehicles need annotated data that reflects the full complexity of urban driving. That includes jaywalkers, double-parked trucks, emergency vehicles, temporary signage, and the chaotic geometry of unprotected left turns. Labels have to be precise enough to let perception models distinguish a delivery worker stepping off a curb from one simply standing near it. HD mapping work also fits in here, with annotators labeling lane boundaries, road features, and static infrastructure that give vehicles the spatial context they need to navigate safely.