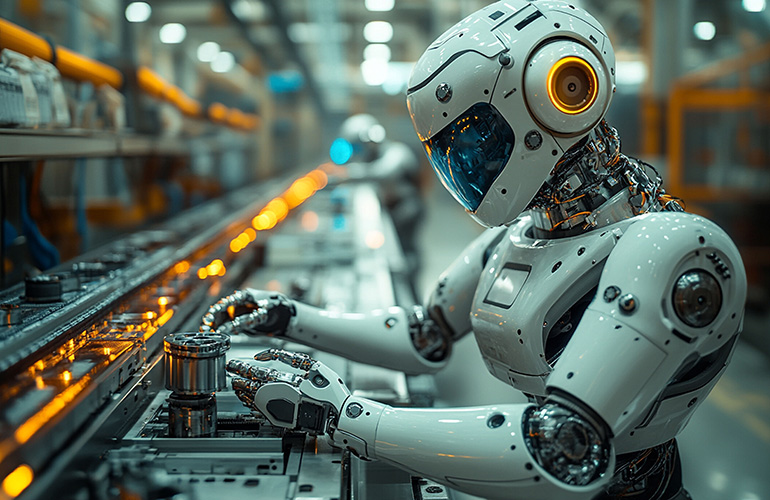
Humanoid robots need the right motion components to meet performance requirements, says IKO. Source: Adobe Stock
Humanoid robots are expected to transform a broad spectrum of activities, thanks to advanced neural networks that command joints, appendages and end effectors to provide virtually human skills. However, the growing adoption of humanoids would not be possible without advanced motion components designed to fit their tasks and environments.
Some of the growing markets include healthcare, retail and hospitality, manufacturing, material handling and logistics, to name a few. In fact, the humanoid market potential is projected to reach up to $38 billion in sales by 2035, according to Goldman Sachs research.
Let’s look at some of the design elements you need to sort through to specify the right motion component and optimize it for a robot’s intended tasks and environments.
Humanoid tasks require precise, controlled motion
Although mechanical systems in humanoids will likely need optimized components to perform tasks in their planned environments, it’s important to find out what standard products can do for your motion system before committing to a custom component.
From there, you can take your special requirements to a motion component specialist with proven experience modifying standard products to address application challenges. Here are some common humanoid motion elements along with some standard components that are well-suited for the task, using IKO products as examples:
- Hip, joint, elbow, or wrist motion. There’s no more important component in humanoids than crossed roller bearings (CRBs). With rollers alternately crossed at right angles to one another between their inner and outer rings, CRBs can handle radial, thrust, and moment loads at the same time. This arrangement allows the rollers to make greater contact with the raceway so robotic actuators in elbows, hips, and other joints can manipulate heavy loads with greater stability and rotational accuracy — all in a compact size. Not surprisingly, a typical humanoid has between 14 and 20 CRBs to perform various functions.
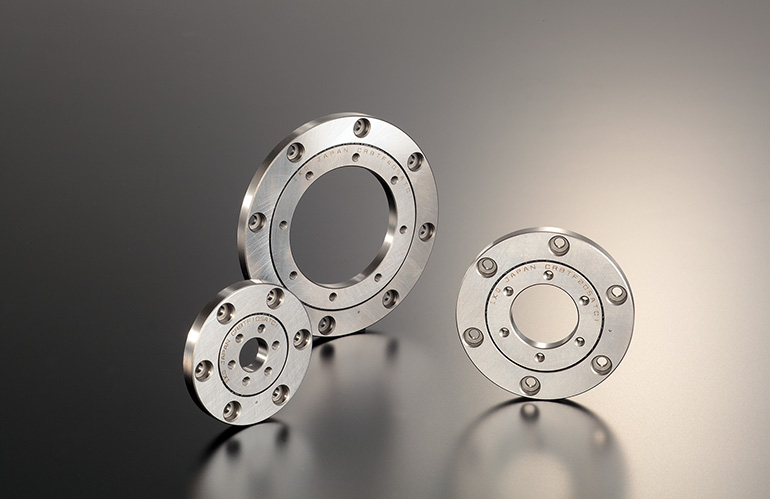
The CRBT and CRBTF crossed roller bearings measure just 5.5 mm high and 5 mm wide. Source: IKO
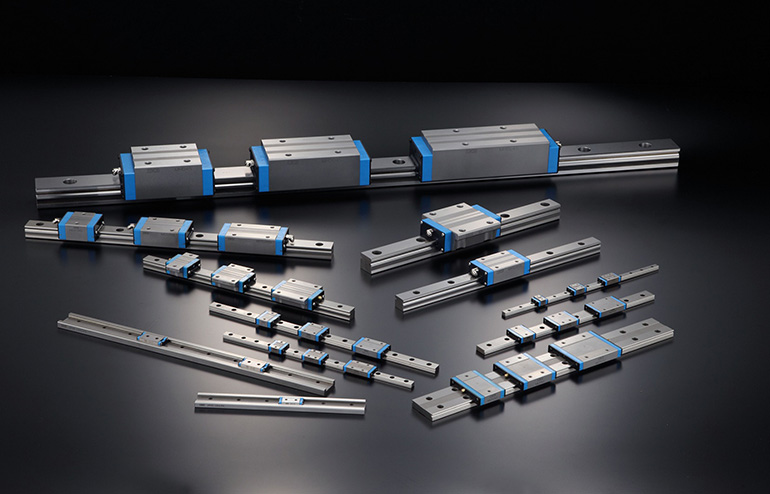
- Controlled linear motion. Linear motion rolling guides come in a wide range of sizes, making them suitable for different parts of a humanoid body. For example, grippers and end effectors that mimic fingers are often used to grasp objects and, therefore, must open and close with precision. Linear motion rolling guides are critical in picking and placing tasks by giving robot fingers just the right clamping force to manipulate the object while also allowing them to be sufficiently nimble to avoid damaging the object.
One such guide, IKO’s ML Series, comes in some of the industry’s smallest sizes, while the LWL is available with a width of just 1 mm (0.03 in.). Many of its bearings boast a recirculating ball-type design to provide precise, controlled motion.
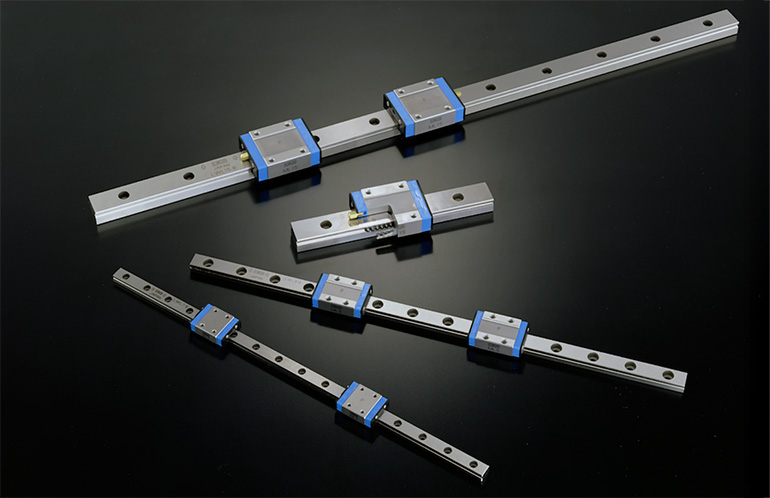
ML Series linear motion rolling guides come in some of the industry’s smallest sizes, IKO claims. Source IKO
IKO guides are also available in standard and highly rigid long versions that can be designed into a robot’s torso, arms or legs to extend its reach to, for example, access high shelving. These guides can even be used in a robot’s neck to allow the head to peer above or around obstacles to better “see” its surroundings.
- Spherical plain bearings — also known as bushings — stabilize humanoid limbs as they pivot and simulate human actions. For example, many humanoids have a rod on the rear of the foot that connects to the baseplate. With spherical plain bearings in this type of design, feet and ankles can turn, rotate, or lean forward or backward.
- Gripping and turning objects. Cam followers are desirable in many internal designs that need a part to ride onto a cam and can be mounted above a circular arc to provide more degrees of freedom.
IKO said it offers some of the smallest cam followers in the market, including units with stud diameters as small as 1.4 mm (0/05 in.). These components also have an internal design that handles thrust loads without significant degradation to the product.

Linear guides can help a humanoid robot extend its reach. Source: IKO
Performance improvements involve motion trade-offs
Since humanoid robots are designed to occupy the same environments as people and manipulate uniformly sized objects such as warehouse totes, it can be easy to think that standard motion components are requisite. But once you have decided on the type of component you need, the only limit to improving your system’s performance is your ability to optimize your motion goals.
When it comes to performance enhancements, it’s important to remember that humanoid designs come with trade-offs that typically pose difficult questions. Have a trusted motion component supplier assess your needs, advise you of your options and help provide answers. Therefore, it pays to work closely with your component manufacturer, especially when your humanoid design objectives include:
- Motion control. Any joint that needs to pivot, turn, rotate, or oscillate will require motion components. But to mimic human movements, various joints and actuators will need to work with effective motion control. For example, here’s how your motion component manufacturer can help you work through the issues involved in achieving high precision and smooth rotation in a traditional robotic joint:
Although two thin section bearings can do the job, they will consume a large amount of space and come with a high cost. IKO CRBs can eliminate the two-bearing system. They integrate two bearings into one platform via rollers arranged in an “X” pattern, allowing them to handle large axial, radial, and moment loads simultaneously to perform complex tasks while saving space. Customizations may include additional flanges or different bolt patterns to simplify installation.
Maintenance-free components keep humanoids on the move
In humanoids, as with any device with motion systems, keeping bearings and other components properly lubricated is a key concern. Many humanoids are expected to repeat tasks many thousands of times with no deterioration of moving parts. And, those parts are typically integrated into tight spaces.
IKO solves this problem with C-Lube — a lubricating element built into many products including linear guides and cam followers. In linear guides, C-Lube supplies the lubricating oil to the surfaces of its rolling elements without contacting the track rail. This built-in lubrication system can run maintenance-free for five years or 12,500 mi. (20,116.8 km) and beyond. Taken together, C-Lube components deliver long-lasting, maintenance-free performance so your humanoid robots will stay on the move.
- Fit the existing work environment. Advanced motion-control strategies are also sometimes necessary to get a humanoid to perform in a distinct work environment. Suppose a robot must handle an object at a shelf height or depth that a person may not be able to reach. The right motion component manufacturer can add linear extending mechanisms to arms or legs, or modify a torso to create a physical structure that can overcome a human’s physical limitations and adapt to a more complex work environment.
- Minimize maintenance requirements. Reducing and predicting maintenance needs are important aspects when designing motion systems that will be expected to consistently perform tens of thousands of times without degradation. While some components with integrated sensors can, for example, alert operators to mechanical damage, IKO strives to manufacture products that are maintenance-free over the life of the application.
C-Lube is a built-in lubrication system for linear guides. Source: IKO
Custom components give humanoids free range of motion
Since humanoid robots are intended to move freely as they take on their tasks and environments, custom motion components are critical to facilitating movement as well as optimizing productivity and reliability. When developing a custom solution for your humanoid robot, keep some of these best practices – using crossed roller bearings as an example – in mind. Remember that humanoids can contain as many as two-dozen CRBs.
- Ensure motion accuracy. As is the case with stationary robots, precise motion is essential. Crossed roller bearings are constructed to provide high rigidity and positioning accuracy. This accuracy can be optimized further and backlash can be eliminated, for example, by adding a light preload or minimizing clearance in robot joints, which also allows smooth motion.
- Minimize power consumption. The less power the humanoid needs to fulfill its mission, the longer the battery life. Crossed roller bearings can be custom-designed to distribute loads more effectively, exhibit lower rotational torque, minimize friction via separators, eliminate backlash, or use lighter-weight materials which can all help reduce power consumption.
- Consider installation and assembly. CRBs give robot joints their ability to pivot, and proper mounting is key to ensuring accuracy and preventing misalignment as well as the associated damage to the bearings themselves. Custom options can include special housings, plates, flanges, and mounting holes.
- Specify components to stand up to harsh conditions. In most applications, Alloy 52100 provides good strength and anti-fatigue characteristics. However, some humanoids will be deployed in harsh environments, requiring corrosion-resistant stainless construction or special seals to repel dust and dirt as well as prevent grease leakage. Black chrome and thin dense chrome surface treatments also provide effective protection in many harsh environments.
- Don’t forget maintenance. For situations in which a traditional lubricating grease is not possible, IKO recommends alternatives such as a dry film lubricant to reduce friction or even a liquid crystal lubricant for clean environments.
Collaborate early with your motion component supplier
As you specify custom motion components for humanoid robot applications, it’s important to get in touch with your supplier early in the design process to avoid the extra work that can arise over time. IKO uses its extensive expertise on CRBs, linear motion components, spherical bushings and cam followers in custom solutions that encompass all the conditions and scenarios you expect your humanoid to encounter.
We work with customers every step of the way, including testing and validating the custom part to ensure it performs as expected when the humanoid goes to work. Whether the motion component is intended for manufacturing, caregiving, home maintenance, or fulfilling orders, IKO stands ready to help you create a custom motion product that will operate reliably and provide a long, productive lifetime.
About the author
Karl Wickenheisser is vice president of sales and marketing at Parsippany, N.J.-based IKO International Inc. He is a licensed professional engineer and bearings industry veteran with over 38 years of international experience at IKO, The Torrington Co., FAG Bearings and RBC Bearings.
An active member of both the Bearing Specialist Association (BSA) and Power Transmission Distributors Association (PTDA), Wickenheisser is a graduate of Stevens Institute of Technology with a bachelor’s degree in mechanical engineering (BEME). He also has an MBA from Fairfield University.
IKO has 50 years of experience in motion control. The company‘s products include needle roller bearings, linear motion rolling guides, precision positioning tables, the C-Lube technology, and machine components.
Editor’s note: Learn more about humanoid robot development at RoboBusiness 2025, which will be on Oct. 15 and 16 in Santa Clara, Calif.